Mobile
Robots
|
|
|

|
|
Dynamo (2012):
A PackBot that is
capable of climbing tall obstacles by shifting its center of gravity using
its manipulator arm. As part of DARPA's
Maximum Mobility and Manipulation Program, I developed the Dynamic
Threshold Learning algorithm, which allows the robot to learn the appropriate
arm position based on experience. |

|
|
|

|
|
Daredevil (2008):
A PackBot mobile robot
equipped with ultra wideband (UWB) radar, LIDAR, and stereo vision. The
goal of this TARDEC-funded project is to
develop an all-weather perception payload for the PackBot that can use UWB
radar to see through adverse weather (rain, snow, etc.) as well as foliage
and fuse these readings with high-resolution sensor data from LIDAR and
stereo vision. |

|
Indoor Mapping Route
Reconnaissance |
|

|
|
CHARS (2003):
A chemical weapons, hazardous gas, and radiation sensor payload developed at
iRobot Corporation for the PackBot
mobile robot. I was the technical lead for this project, which was
funded by the U.S Navy Space and Naval Warfare Systems Command (SPAWAR) under
direction of the Department of Defense Robotic Systems Joint Project Office
(RS JPO). Based on a laboratory prototype initially developed at
SPAWAR, iRobot developed a ruggedized payload using off-the-shelf portable
sensors to detect chemical weapons, hazardous gases, and gamma and neutron
radiation. Four PackBots with CHARS payloads
were deployed to Iraq. |

|
Valkyrie
(2003): A battlefield casualty recovery
robot developed at iRobot Corporation
based on the PackBot and
NEOMOVER (Warrior prototype) platforms and funded by the U.S. Army Telemedicine and Advanced Technology Research
Center (TATRC). Valkyrie includes a Sked flexible stretcher that is delivered to the
casualty using a PackBot and towed to safety by robots or other soldiers. |
|

|
|
Griffon
(2003): A hybrid UGV/UAV developed at iRobot Corporation based on the PackBot platform. I
was the Principal Investigator for this project, which was funded by the U.S.
Army's Tank-automotive and Armaments Command (TACOM) Armaments Research,
Development, and Engineering Center (ARDEC). The Griffon prototype was
designed by Pavlo Rudakevych.
Griffon combines the ground mobility of the PackBot platform with an Air Mobility
System (AMS) including a steerable parafoil wing
and a gasoline-powered propeller motor. Griffon Test Flight |

|
Bloodhound (2002):
A battlefield medical robot prototype developed at iRobot Corporation based on the PackBot platform and funded
by the U.S. Army Telemedicine and Advanced
Technology Research Center (TATRC). |
|

|
|
Deployer
(2001): A DARPA-funded
project at iRobot Corporation to develop
techniques to control heterogeneous robot teams consisting of a large,
sophisticated robot (the Deployer) and many small,
simple robots (the Swarm). I developed the mapping system that enables
the Deployer to build a topological map from local
sensor information provided by the Swarmbots.
The Deployer can then use this information to
navigate through the Swarm.
|

|
iRobot-LE (2000):
A robot developed by iRobot Corporation
for Internet telepresence. The iRobot-LE was the predecessor of the CoWorker telepresence robot. I was the primary developer
of the mapping and navigation system used by the iRobot-LE. |
|

|
|
Roadrunner
(1998): A Nomad 200 mobile robot equipped with sonar, infrared,
and laser range sensors. I used Roadrunner to develop ARIEL (Autonomous
Robot for Integrated Exploration and Localization) at the Navy Center for Applied Research in
Artificial Intelligence at the Naval
Research Laboratory (Washington, DC). ARIEL combines frontier-based
exploration with continuous localization. I also used this robot to
develop ELDEN (Exploration and Spatial Learning in Dynamic ENvironments) for my Ph.D. research with the CWRU
Autonomous Agents Research Group (Cleveland, OH). |

|
Coyote (1997) :
Another Nomad 200 mobile robot at the the Navy Center for Applied Research in
Artificial Intelligence, equipped with passive infrared motion sensors to
detect people. We entered Coyote in the the Hors d'Oeuvres Event at the AAAI-97 Robot Competition - where
mobile robots served refreshments to conference attendees at the opening
reception. We won first place in the technical competition and second place
overall. |
|

|
|
Nomad 200 (1996):
I used another Nomad 200 in my research on place learning and place
recognition at the Institute for the Study of
Learning and Expertise (Palo Alto, CA), |

|
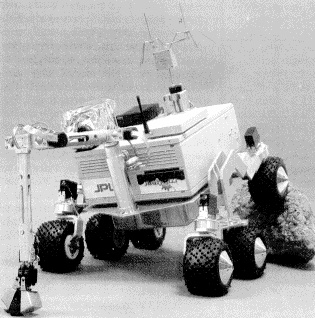
Rocky III (1991):
A minirover built at the Jet Propulsion Laboratory (Pasadena, CA)
as a prototype for a Mars rover/sample return mission. I developed a reactive
navigation system for Rocky III using a set of simple sensors (contact
switches, compass, wheel encoders, inclinometer). Later versions of the Rocky
series of rovers were used as prototypes for the Sojourner rover on the Mars
Pathfinder mission. |
|
|
|
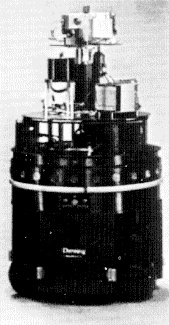
Denning MRV-1 (1990):
A mobile robot equipped with sonar sensors at Hughes
Research Laboratories (Malibu, CA) which I used to develop behaviors for
hallway following and obstacle avoidance. |
Autonomous
Vehicles
|
|
|
||

|
|
R-Gator (2004):
An autonomous version of John Deere's M-Gator
all-terrain vehicle. iRobot developed
the autonomy system for the R-Gator, which was capable of following a trained
waypoint path while avoiding obstacles using LIDAR and radar. I worked on the R-Gator's RTK GPS/INS
localization and navigation software. |

Robot
Arms
|
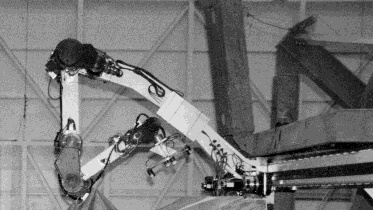
ARID (1992):
A robot arm equipped with vision and sonar sensing, built at Kennedy Space
Center (Cape Canaveral, FL) for inspection of the radiator panels on the
space shuttle orbiter payload bay doors. I developed the software to
determine the orbiter position based on visually detected features, and to
align the robot with the orbiter using the sonar sensors. |
|
|
|
Grasper
(1990): A behavior-based grasping robot
consisting of a Utah/MIT Dextrous Hand mounted on a
Puma 761 robot arm that I developed software for at the University of Rochester (Rochester,
NY). A ceiling-mounted camera provided the locations of objects, and
reactive grasping behaviors were used to pick up and arrange objects. |

|
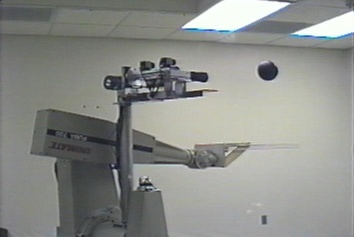
Juggler
(1989): A behavior-based balloon-bouncing robot I developed at
the University of Rochester
(Rochester, NY) using a Puma 761 robot arm equipped with real-time vision
(and a racket). |
|